Giraffe Robot Simulation Environment
Published:
Duration: TBD
Affiliation: TBD
Note: Full write-up coming soon.
Overview
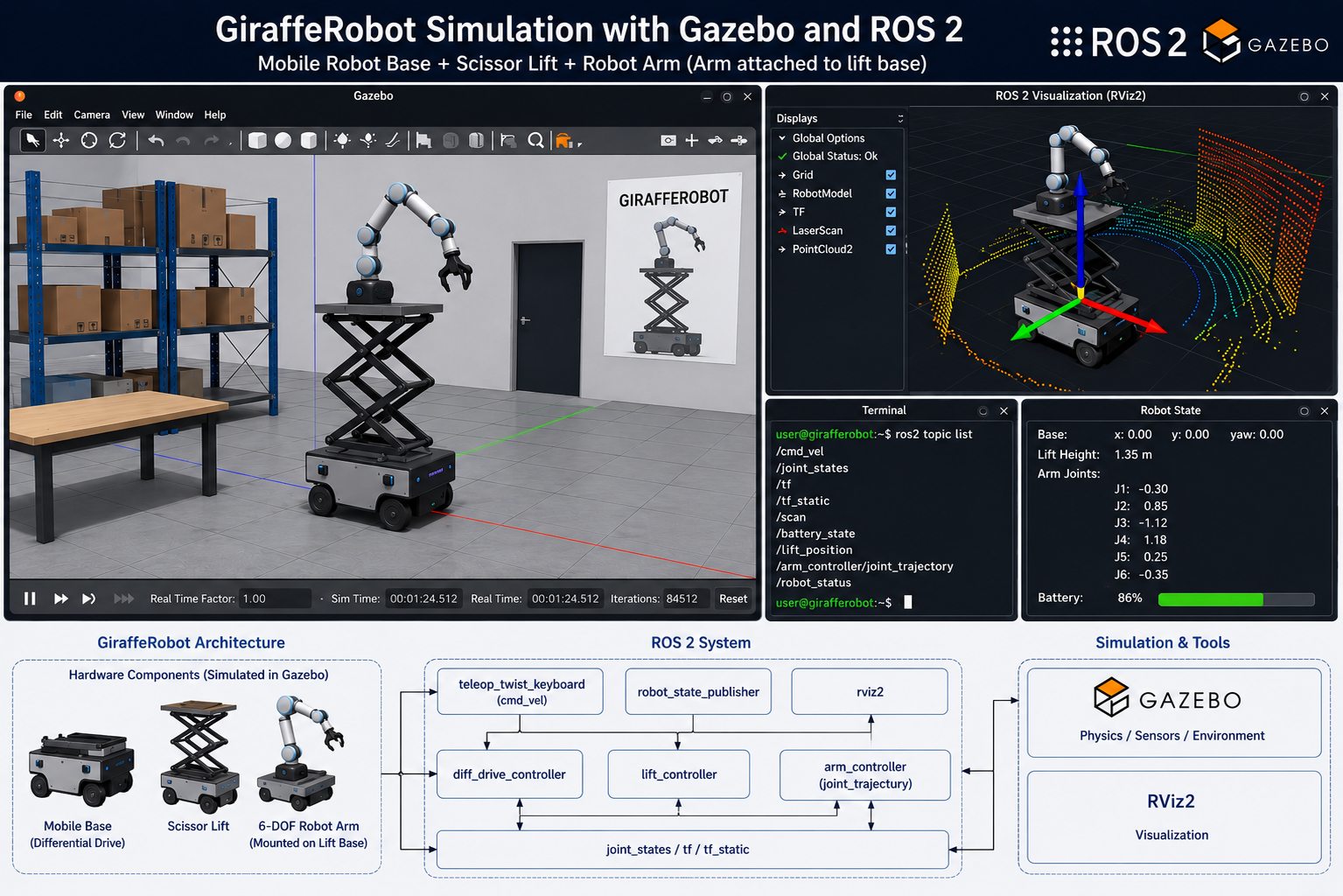
Physics-based simulation environment for a giraffe-inspired long-reach service robot. Designed to allow rapid prototyping of manipulation and navigation algorithms prior to real hardware testing.
Planned Content
- Robot model design and URDF/SDF specification
- Task-space control and inverse kinematics
- Manipulation experiments in simulated environments
- Integration with ROS 2 and Gazebo/Isaac Sim
Technologies
ROS 2 Gazebo Python URDF Robotics Simulation
Gallery