Android VR See-Through System for Medical Assessment Robots
Published:
Duration: Nov 2023 – Sep 2025
Affiliation: Human Robotics Laboratory, Nara Institute of Science and Technology (NAIST) · Ikoma, Japan
Overview
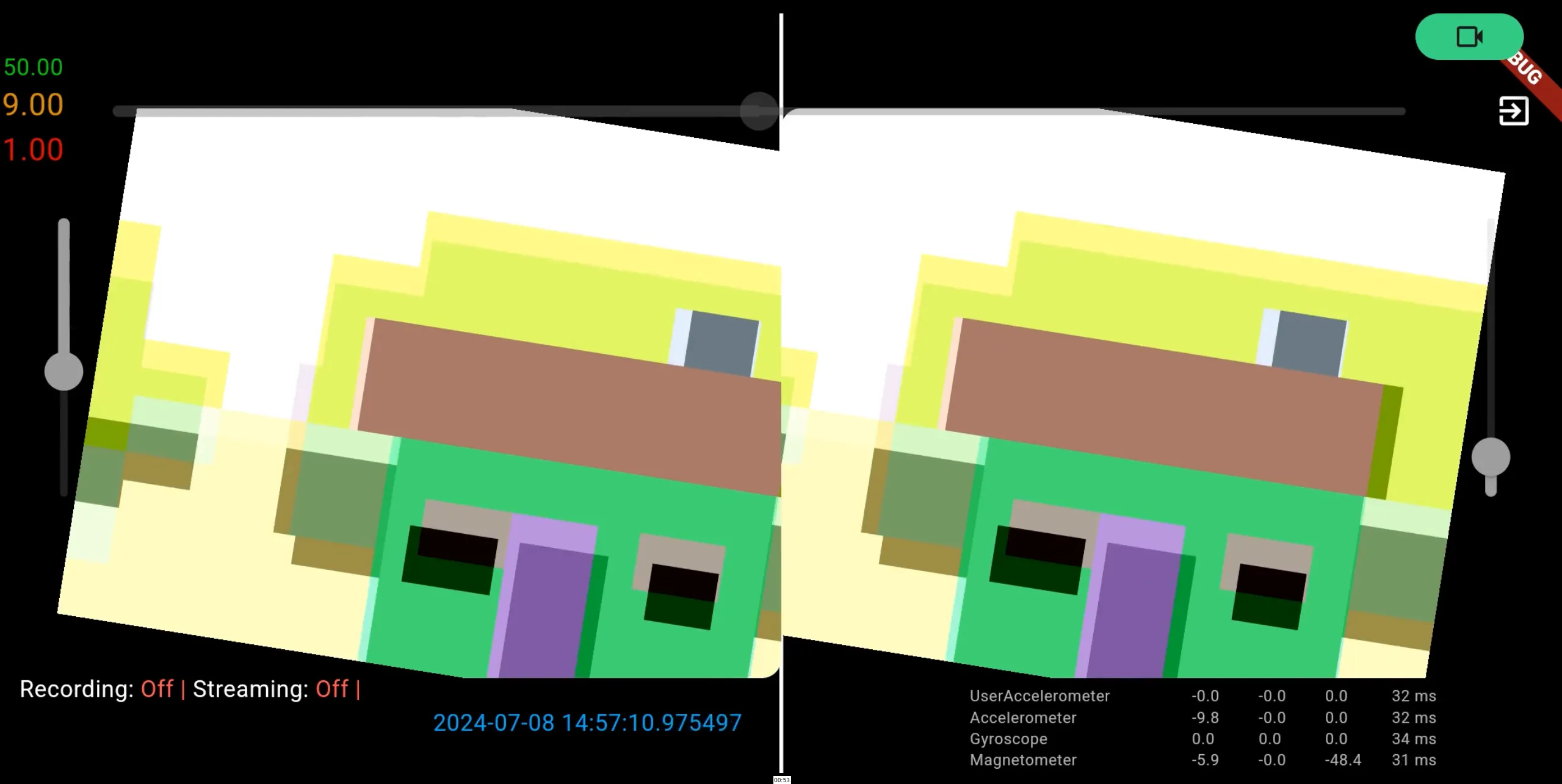
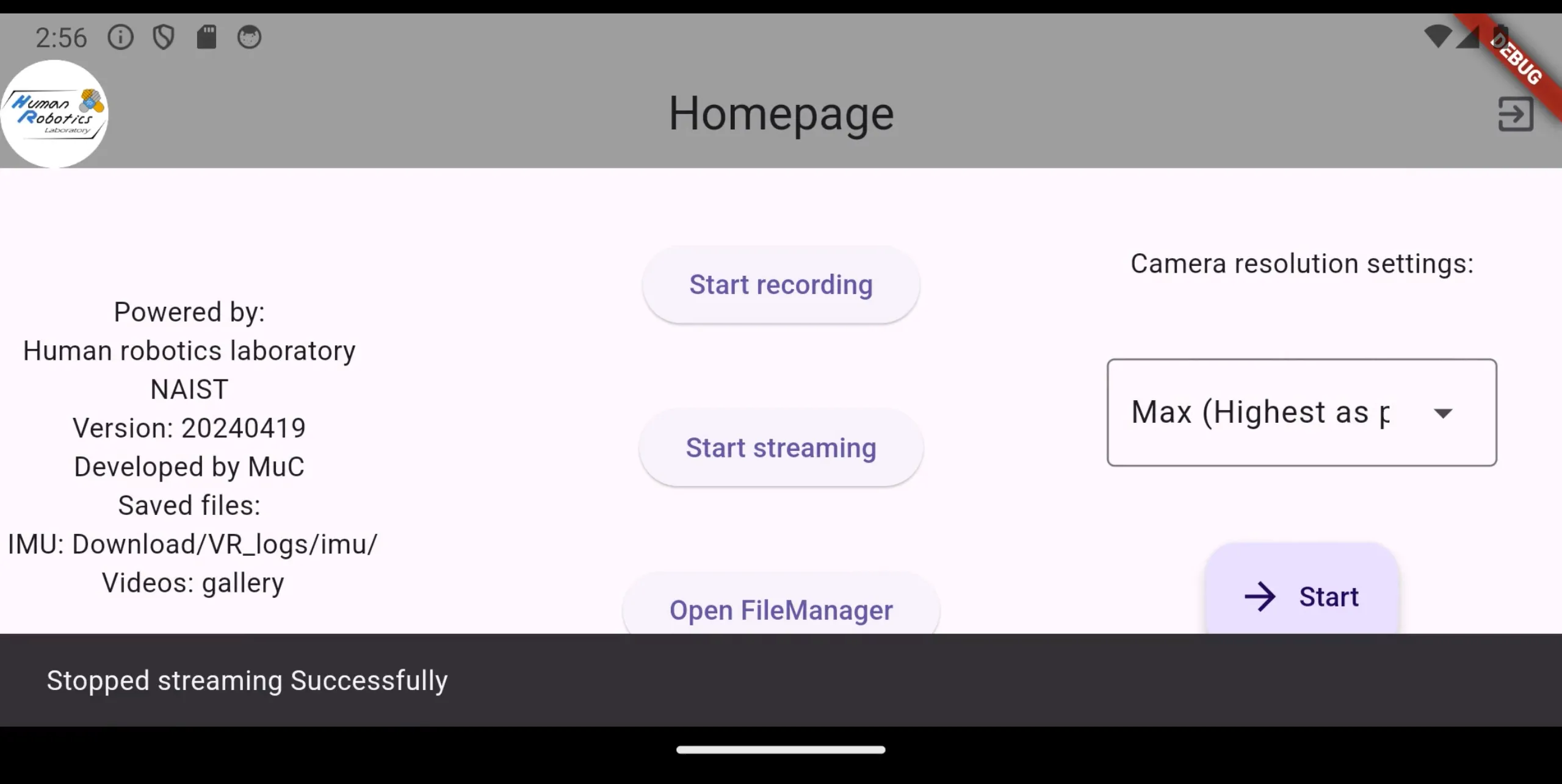
Developed an Android-based VR see-through application for medical assessment robots. The system streams sensor data from the robot (camera, depth) to a clinician’s VR headset in real time, enabling remote observation of patient behavior without physical presence — improving accessibility and safety in clinical assessments.
Key Contributions
- Built a real-time streaming pipeline from robot sensors (ROS 2) to Android VR client
- Implemented the VR see-through rendering and interaction interface in Flutter/Android
- Integrated with the robot’s ROS 2 control stack for synchronized sensor access
- Tested with clinical assessment scenarios to validate usability and latency requirements
Technologies
Flutter Android ROS 2 Python VR Real-time Streaming Robotics
Gallery